-

National ABU Robocon'16,
Shri Shiv Chhatrapati Krida Sankul, Pune
-

2nd Runners Up, Robocon'16
-
Think. Innovate. Create
about us
We are a team of dedicated students, sharing a channelized aim of competing at the prestigious “ROBOCON”. Our thinktank includes innovative members, with a concrete vision for approach and execution. We have hands on experience in multitude of electromechanical apparatus and equipment. We are always in pursuit of creative thinkers and designers, with a view to expanding and refining the troupe.
plan and manage
Strategy formulation rests at the highest pedestal of our priority. We perform substantiation for framing out the most effective forethought and time frame.
manufacture
Machining/Fabrication forms the crux of any physical construct. We design and manufacture assembly autonomously, with the use of cutting edge machinery and tools.
test and optimize
Performing conclusive tests acts as a proof reader for the project. Strenuous tests and optimizations and carried out each time, to make the design closer to absolute “perfect” (flawless).
compete
The final contest provides the platform for the showcase of entire team instantiated by the ROBOT.
About robocon
Robocon is mainly sponsored by Asia Pacific Broadcasting Union (ABU) which includes Doordarshan (Prasarbharati) of India as a member which has been organizing all activities in India for last five years with collaboration with Maharashtra Institute of Technology (MIT) Pune, India. It is an annual robot contest started from 2002, just for university, college and polytechnic students in the Asia-Pacific region. Participants will compete with their peers in other countries to create a robot using their creative and technological abilities in an open competition.All this according to a theme declared by the host Country.
teams
participants
months
goal
ABU-ROBOCON 2019 PROBLEM STATEMENT RELEASED
Robocon problem statement-2019
Link to the official rulebook concerning this year's problem statement. If you find any discrepancy, we'll be happy to hear it out from you -
Here is the link to the demostration video of the problem statement -
To know more about the challenges that Robocon has to offer, Refer to the previous year problem statements provided below.

Robocon 2018
ABU Robocon 2018 was held in Ninh Binh ,Vietnam and the goal of this game is to throw a shuttle cock through a ring at a height
read more
Robocon 2017
ABU Robocon 2017 was held in Tokya ,Japan.In this match each team have to throw a disc on poles at a different height and distances
read more
Robocon 2016
ABU Robocon 2016 was held at Bangkok, Thailand and it's theam was "Clean Energy recharging of world"
read more
Robocon 2015
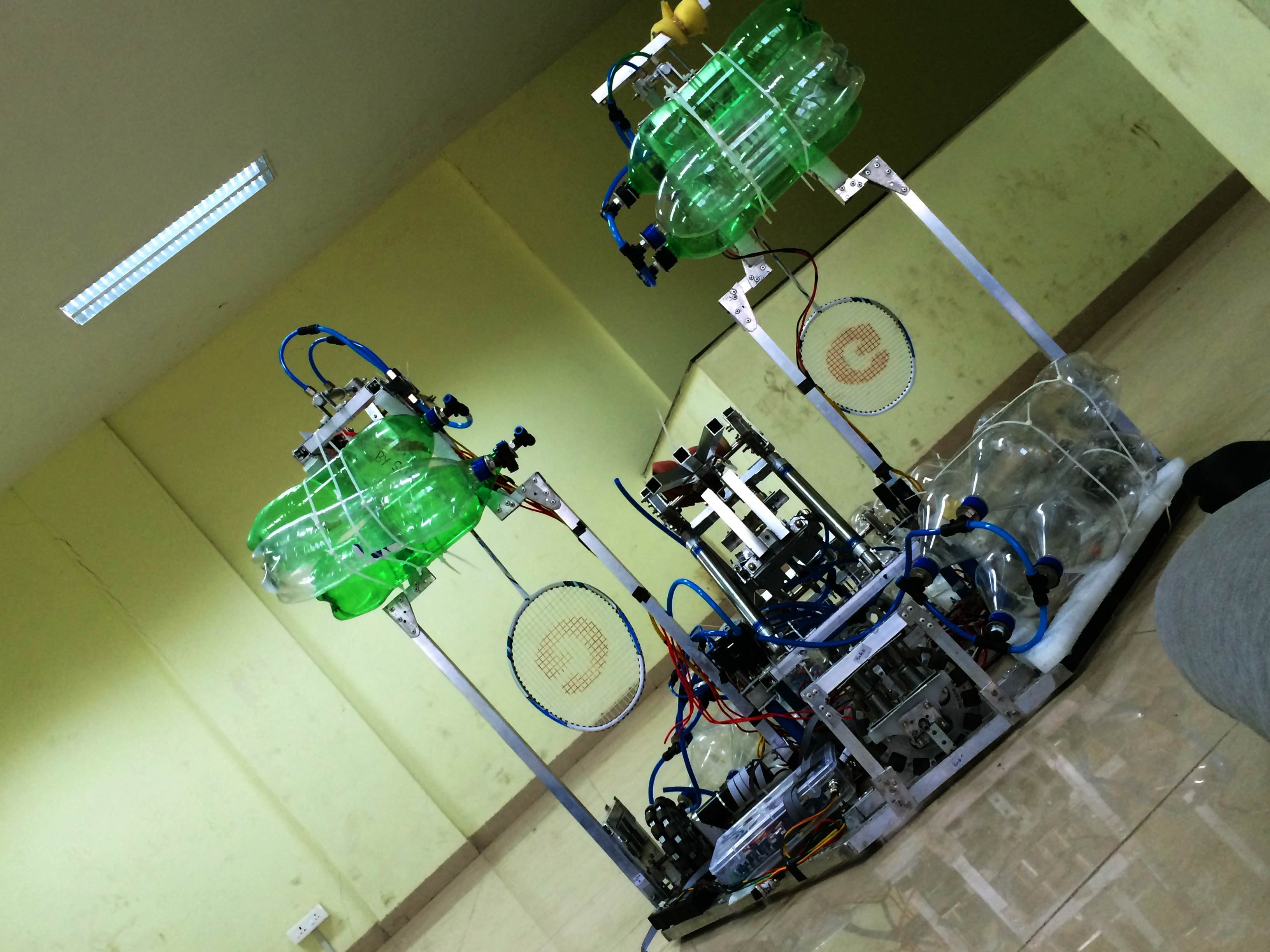
The ABU Robocon 2015 was held in August in Yogyakarta, Indonesia.Each team have to make two robot to play badminton game against eachother
read more
Robocon 2014
The ABU Robocon 2014 was conducted at Pune, India.The Theme for Robocon 2014 declared by India was "A Salute for Parenthood"
read morewhat we do?
We believe in the principle of simplification and symbiotic subsystem teams. To achieve this, we have fragmentized the entire team into 6 primary subsystem-specific divisions.
CAD Modelling
Through dynamic cad modelling, we aim to put up a precise
virtual replica of the intended robotic assembly.
Mechanism
An apt mechanism in clear linkage with the problem statement
and efficiency, is what we extensively work upon.
Control Systems
We consistently work to develop a centralized and dynamic control
system for robot handling and relay, primarily integrating with ROS.
Image Processing
Through OpenCV and other peripheral softwares,
we plan to impart automatic guidance to the robot.
gallery
Take a sneak peek at our offbeat frames captured during robo-genesis, perfect combo of man and machine.
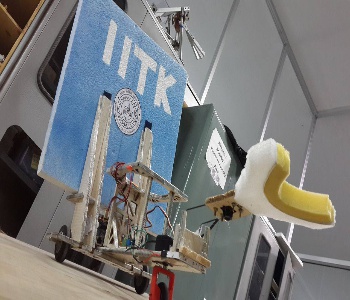
Token lifter
Robocon
Team Robocon
Winning photo
Summer 2018
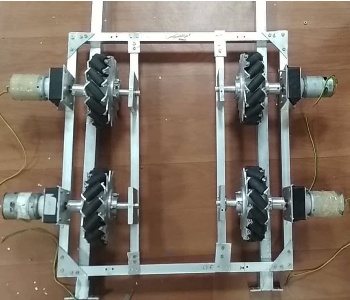
Throwing machine
Pneumatics assembly

Team
Lifting machine
Test bot

Summer 2018

Robocon 2016

Team

Team

Team
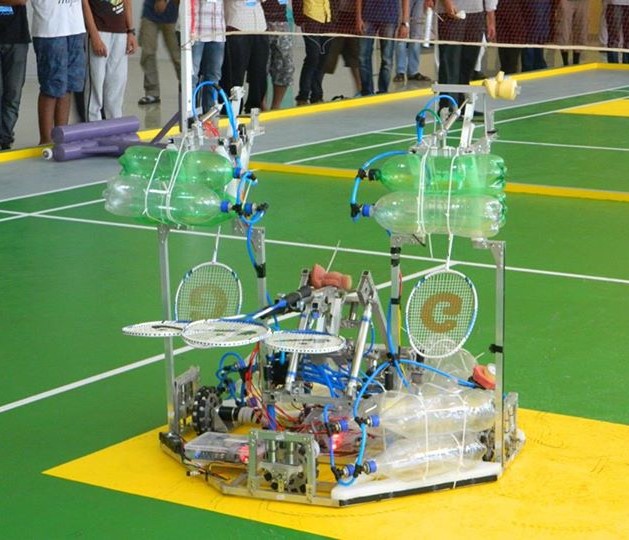
Badminton playing bot
Clean energy bot
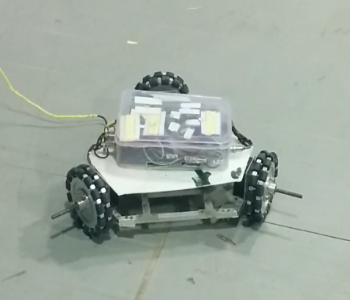
Test bot
Meet our team
Our team comprises students from myriad disciplines each having a distinct expertise in subsystems and holistic integrations. However, we are always up for upgradations and advancements!! So meet up the figures behind the upcoming project.